My exercise equipment doesn’t connect to a network. But I still want the "smart workout experience" when I'm using a "dumb" rowing machine.
If I maybe point my webcam at the equipment’s LCD output, I can make my computer interpret the digits. Perfect! I’ll just utilize object detection to determine the location and identity of digits on the machine’s readout.
First question -- just a tiny one -- how do you do that?
After wading through several guides, I found Roboflow's YOLOv5 tutorial. They provide a hands-on and accessible experience in machine learning. But unfortunately, I couldn't progress immediately on my specific project. Instead, I had to build my own dataset.
As I labeled digits on image after image, tedium tore at me. I envisioned using the YOLOv5 model predictions as "pre-labels". I sleuth through Ultralytic's original project, and I build wrappers around detect.py and train.py. I determine that my vision could be a reality.
This repository contains the tools that let me "pre-label" my images before sending them off for human inspection and correction. I also provide labeled and unlabeled images to demonstrate the tools.
Image Repo/labeled/Final Roboflow Export (841)/- 841 labeled image dataset
unlabeled/21-3-22 rowing (200) 7:50-12:50/- 200 images with direct lighting from one light source
21-3-22 rowing (200) 1:53-7:00/- 200 images with direct lighting from one light source and intermittent glare
21-3-18 rowing 8-12/- 200 images with direct light and ambient lamps turned on
project_name = "seven segment digits - "
I back up the input files after writing them to disk just in case something breaks.
backup_dir = "archive/Generation/zips"
Grab my code.
!git clone https://github.com/PhilBrockman/ModelAssistedLabel.git
%cd "ModelAssistedLabel"
Inputs
- labeled images
- All of the images and labels must be in a common folder (subfolders allowed).
- Labels must be in YOLOv5 format.
Note: Image/label pairs are based on their base filename. For example
image.jpg/image.txtwould be paired as wouldother_image5.jpg/other_image5.txt.
labeled_images = "Image Repo/labeled/Final Roboflow Export (841)"
- unlabeled images
unlabeled_images = "Image Repo/unlabeled/21-3-22 rowing (200) 7:50-12:50"
Start by building the folder structure for the output.
from ModelAssistedLabel.config import Defaults
import os
export_folder = Defaults._itername(project_name)
# make the export folder
os.mkdir(export_folder)
# make the images and labels subfolders
for resource_folder in ["images", "labels"]:
os.mkdir(os.path.join(export_folder, resource_folder))
export_folder
Several values are stored by the Defaults class. Make sure to save() any changes!
d = Defaults()
print(" -- Defined Keys: --")
print("\n".join([x for x in d.__dict__.keys()]))
Speciy the absolute path of the root directory.
!pwd
d.root = "/content/ModelAssistedLabel/"
Save changes and enter root directory
d.save()
d.to_root()
!git clone https://github.com/ultralytics/yolov5 # clone repo
%cd yolov5
# install dependencies as necessary
!pip install -qr requirements.txt # install dependencies (ignore errors)
import torch
from IPython.display import Image, clear_output # to display images
from utils.google_utils import gdrive_download # to download models/datasets
%cd ..
(data_yaml value was pulled from Roboflow tutorial)
I have nc = 10 classes and their names are all string types.
d.data_yaml = """train: ../train/images
val: ../valid/images
nc: 10
names: ['1', '2', '3', '4', '5', '6', '7', '8', '9', '0']"""
d.save()
Make sure that the class names are accessible:
d.get_class_names()
Store the class labels with index 0 on line 1, index 1 on line 2, and so on.
with open(os.path.join(export_folder, "label_map.txt"), "w") as label_map:
label_map.writelines("\n".join(d.get_class_names()))
Check to see the plan for this notebook's lifespan.
if torch.cuda.is_available():
#GPU enabled and ready to train some models
print('Setup complete. Using torch %s %s' % (torch.__version__, torch.cuda.get_device_properties(0) ))
else:
#no GPU access
raise Exception("Enable GPU to make predictions or train a model.")
The Generation class helps convert an unordered folder of images and labels into a format compatible with YOLOv5. By default, the train/valid/test split is set to 70%/20%/10%.
from ModelAssistedLabel.fileManagement import Generation
g = Generation(repo=labeled_images,
out_dir=backup_dir,
verbose=True)
g.set_split()
g.get_split()
Backups are built into this system. As an intermediate step, the split must be written to disk in g.out_dir.
zipped = g.write_split_to_disk(descriptor=export_folder)
Next, the images need to be written in a way so that the Ultralytics repository can understand their content. The AutoWeights class both organizes data and create weights.
from ModelAssistedLabel.train import AutoWeights
#configure a basic AutoWeights class instance
aw = AutoWeights(name=export_folder, out_dir=backup_dir)
# create train/valid/test split from a bag of labeled images (recusively seek out images/labels)
aw.initialize_images_from_zip(zipped)
Inspect the sizes of the train/valid/test groups.
aw.traverse_resources()
With the images written to disk, we can run the Ultralytics training algorithm. I loved watching the progress fly by in real time on the original train.py. Fortunately, the Ultralytics folk write the results file to disk so the model's training data is still accessible!
pre-trained/results for convenience.%%time
"Uncomment this cell to skip training."
# results_folder="pre-trained/results"
try:
#using pretrained results
results_folder
except NameError:
#let the model train and find something else to do for a few hours
aw.generate_weights(epochs=1, yaml_data=Defaults().trainer_template)
# access the folder of results from the AutoWeights instance
results_folder = aw.last_results_path
print("Results: ", results_folder)
The results folder is stored as an attribute as well, and it has a lot of charts and images stored therein.
import os
aw.last_results_path, len(os.listdir(aw.last_results_path))
However, the weights are stored in a subfolder called (aptly) "weights".
os.listdir(aw.last_results_path + "/weights")
The Viewer class needs weights and class labels to operate.
from ModelAssistedLabel.detect import Viewer
# I'm choosing to use the best weight.
weight_path = results_folder + "/weights/best.pt"
# Viewer needs a set of weights and an array of labels for the detected object types
v = Viewer(weight_path, Defaults().get_class_names())
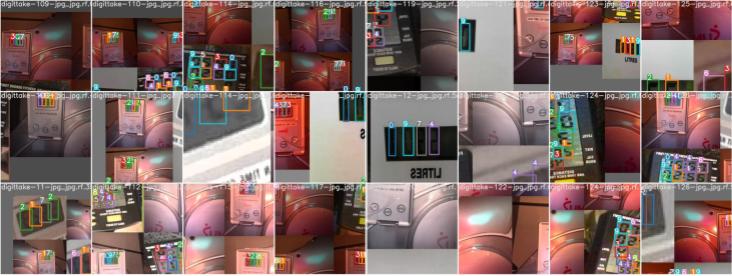
Let's us look through the computer's eyes at the images.
With the existing dataset, the model performs best under direct lighting.
%matplotlib inline
import random, glob
images = glob.glob(f"{unlabeled_images}/*.jpg")
for image in random.sample(images,5):
print(image)
v.plot_for(image)
Make predictions for all images.
results = []
for image in images:
results.append(v.predict_for(image))
In all 600 unlabeled images, the screen has 4 digits.
So lets take a look at the numbers of predictions being made:
import pandas as pd
ax = pd.Series([len(x["predictions"]) for x in results]).hist()
ax.grid(False)
ax.set_title(label = "Number of predictions per image")

At this stage in development, the YOLOv5 model could still be prone to false positives. However, I interpret the above data to suggest that there are overlapping bounding boxes that need to be resolved.
There are a couple of possible entry points to a programitic solution. The Detector class (build on top of Ultralytic's detect.py) has an iou_threshold attribute (read about Intersection Over Union) that can be fiddled with. Further, in resolving overlapping bounding boxes post-hoc, I would turn to the confidence attribute stored in the results array.
Until prediction checkups can be run in notebook cells, we'll need to export for inspection regardless.
Ensure that image/label pairs have a common root filename and collect relevant files in a single folder.
import random, PIL, shutil
salt = lambda: str(random.random())[2:]
for result in results:
# In case the salt somehow fails to be unique, forcibly generate a unique filename
shared_root = Defaults._itername(f"{project_name}-{salt()}")
#save the image to the outfolder
image = PIL.Image.open(result["image path"])
image.save(os.path.join(export_folder, "images", f"{shared_root}.jpg"))
#save the predictions to the outfolder
predictions = result["predictions"]
with open(os.path.join(export_folder, "labels", f"{shared_root}.txt"), "w") as prediction_file:
prediction_file.writelines("\n".join([x["yolov5 format"] for x in predictions]))
Lastly, if results need to get saved, make sure they get saved.
moved = False #set a flag
try:
if aw and 'last_results_path' in aw.__dict__ and os.path.exists(aw.last_results_path):
# `aw` exists and it has been executed
print(f"Moving yolov5 results: {aw.last_results_path}")
shutil.move(aw.last_results_path, export_folder)
moved = True # flip the flag
except NameError:
#no results attempted
pass
if not(moved):
# either the AutoWeigts didn't pan out or it wasn't used
print("No weights to save")
export_folder
I labeled dozens upon dozens and dozens of images with Roboflow and would recommend their free annotation service! However, to be transparent, I developed an annotator in React that better suited my physical needs.
The Generation class recursively finds all images and lables. So as long as the newly annotated images and the original Image Set are in the same folder, Generation's constructor function will find them.
Wrap Up
I have uncovered a camera and lighting positioning that allows for my model to read the LCD with fidelty. I'm using object detection as a form of OCR and it's working!
I see three main areas for development with this project. The first would be bolstering the dataset (and staying in the machine learning space). The second would be logic interpreting parsed data (building the "smart" software).
The third area of development is refactoring. I made a decision early on to hard to hardcode the path to training and validation images. It's worth revisiting the way Defaults.data_yaml is constructed.
Note on the Image Set
This dataset of 841 images is a mishmash. There's images from a different rowing machine and also from this repo. Some scenes are illuminated with sunlight. Others have been cropped to include only the LCD. Digits like 7, 8, and 9 are underrepresented.
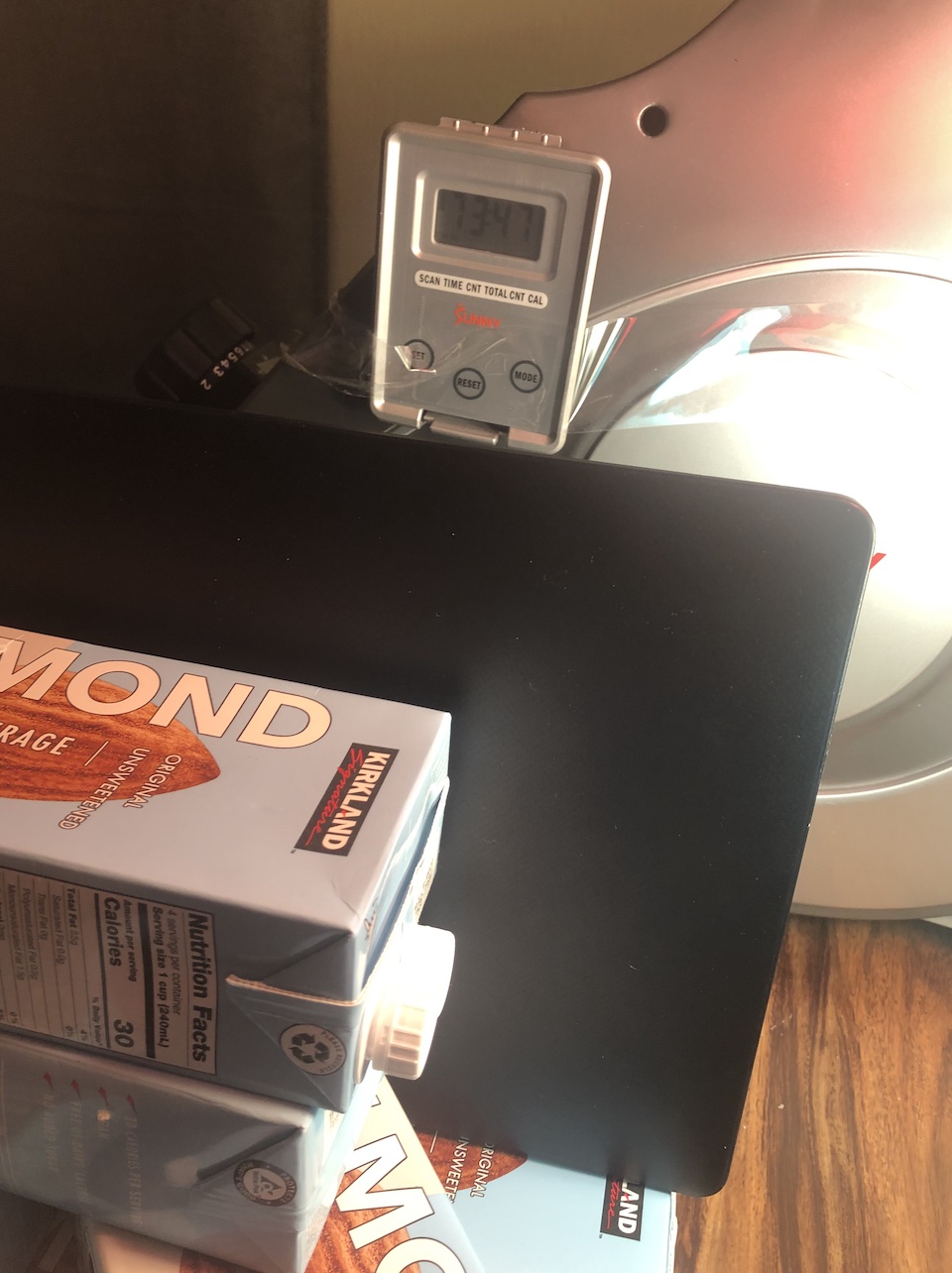
Recording from Laptop
This is my setup for how I'm currently fixing the position my black-shelled laptop while recording: pic1, pic2, pic3.
{kind=link}
{kind=link}
{kind=link}
I use the _capture.ipynb notebook to capture images on a bit of a delay to prevent repeat images from cluttering the dataset. For me, it was much easier to get recording working from a local notebook than from a Colab notebook but YMMV.